|
|---|
|
|
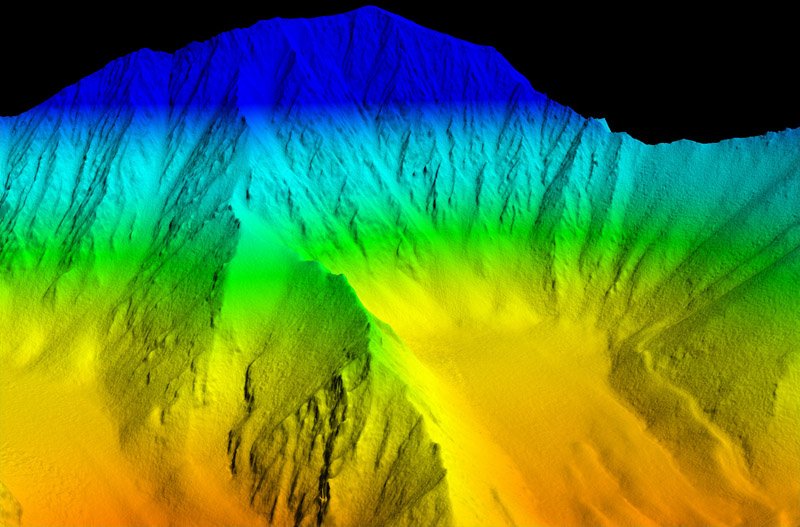
Understanding Fodar™ Fodar is a method of digital photogrammetry, in which aerial photographs are turned into topographic maps and image mosaics. In this method, a plane is flown back and forth in a regular grid pattern over an area of interest, taking photos on pre-planned intervals. The photos within a flight line and between flight lines overlap, such that each spot on the ground is imaged many times. Because we know where the camera was when each photo was taken, we can triangulate the position of each spot on the ground and thereby determine its position and elevation, described by X, Y, Z coordinates in the real-world. In a typical project, millions of such X,Y,Z points are calculated, creating a "point cloud". This point cloud is then turned into a a digital elevation model (DEM) and an orthophoto. A DEM is simply a digital topographic map, where instead of the contour lines of a paper map, the earth is described essentially by a spreadsheet matrix, where the rows and columns are latitude and longitude and the cell values are elevation. To turn the point cloud into a DEM, all points within a grid cell are averaged and any empty grid cells are assigned a value by interpolating from its neighbors. The orthophoto is essentially the same sort of spreadsheet as the DEM, but with cell values representing color of the terrain rather than its height. The area represented by each cell is called the ground sample distance (GSD), or more commonly as the resolution of the map. The GSD is controlled by flying height, lens, and camera and is something that is determined before the mapping mission begins based on project needs. The DEM and orthophoto can have different GSDs, but usually they are multiples of each other; for example, a 20 cm DEM and a 10 cm orthophoto are common Fodar products. Note that because 10 cm describes the edge of a square, a 10 cm orthophoto has 4 times as many pixels as a 20 cm orthophoto, and when making hundreds of square kilometers at this resolution the file sizes are measured in tens of gigabytes.
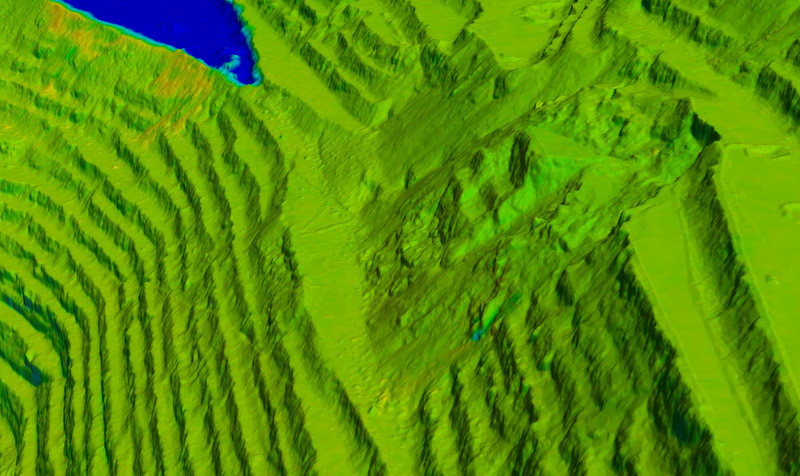
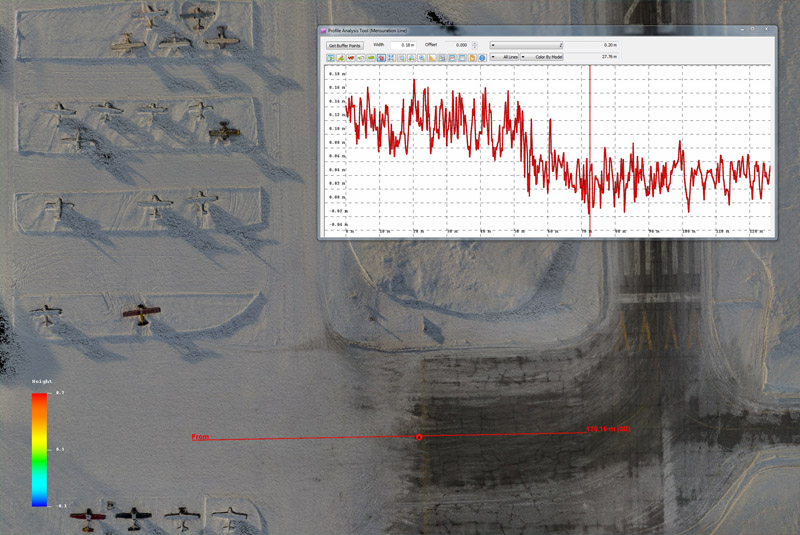
We have done extensive testing of the accuracy, precision and noise level of the Fodar™ method of photogrammetry. Without using any ground control, our DEMs are accurate within the realworld to within +/- 100 cm, and usually better than 30 cm, with the vertical offset typically being the largest. A single high-quality ground control point can reduce this accuracy to the precision level of the DEM. The precision of Fodar™, that is its repeatibility, is about +/- 10 cm. That is, if two Fodar maps of the same area are made on the same day, subtracting those two maps should yield a map where all values are less than +/- 10 cm (assuming the realworld surface did not change). Depending on a variety of factors this precision can be reduced to +/- 5 cm and it can be as high as +/- 50 cm; the coarser the GSD, the lower the precision, and there are other contributing factors. The precision errors take the form of small-scale warps and tilts within the DEM, largely due to slight misalignments between adjacent photos when creating the point cloud. The noise level of Fodar™ DEMs is about 1-3 cm. Because the noise level is much lower than the precision level, features as small as several centimeters in height can be resolved even though they are below the level of precision, but their absolute elevations are suspect at the 10 cm level.
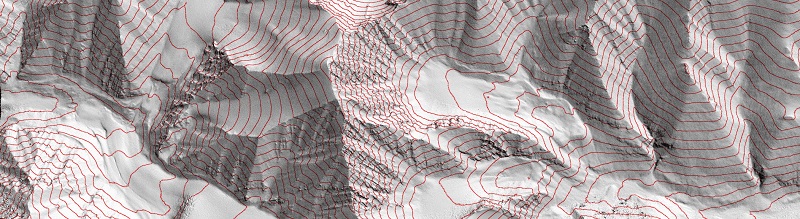
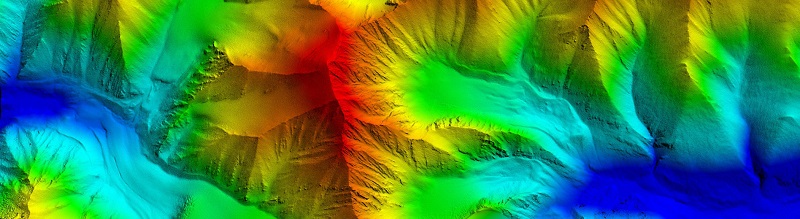
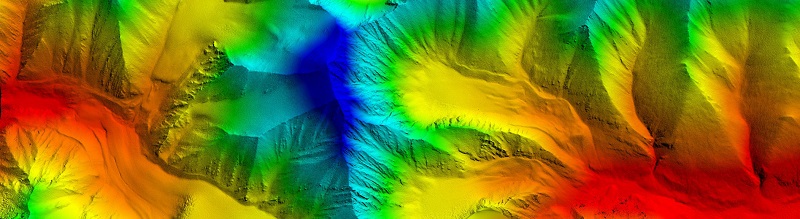
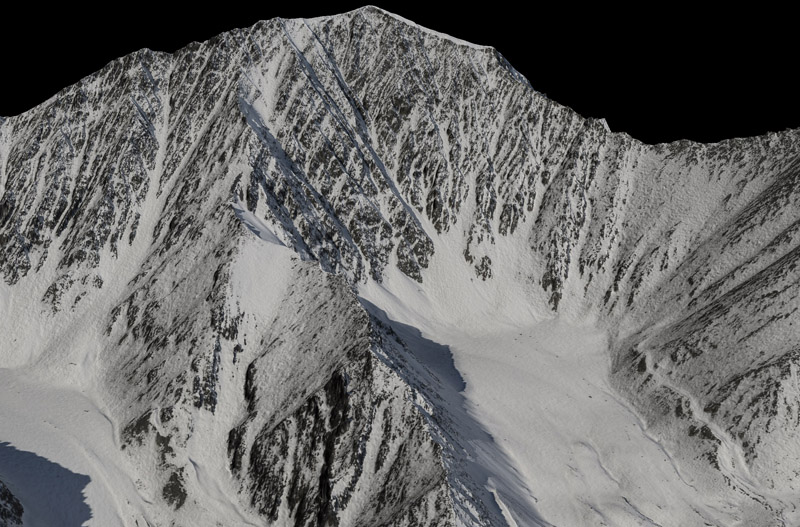
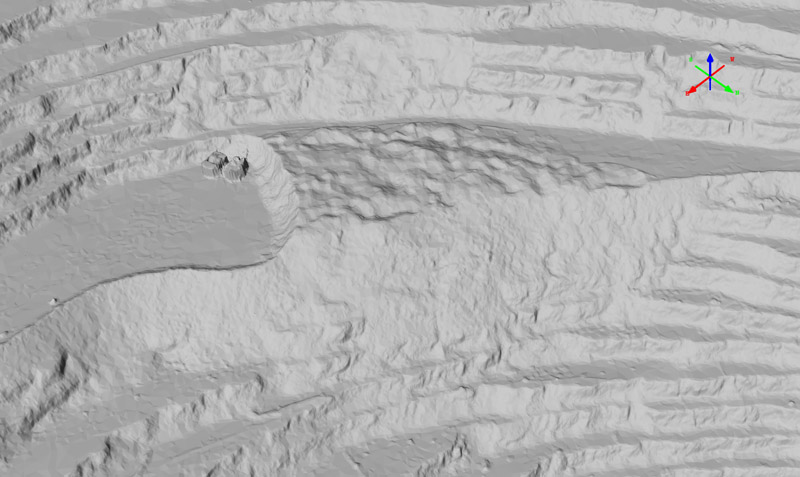
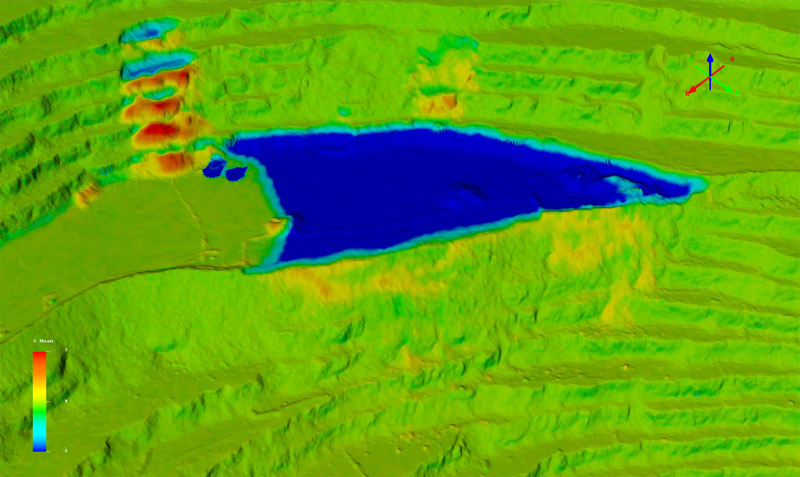
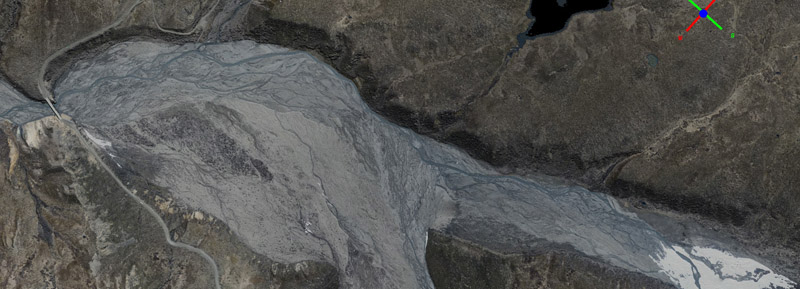
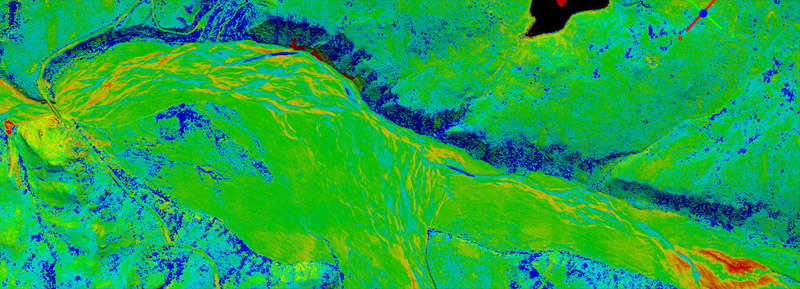
There are several other types of noise in Fodar DEMs. Photogrammetry works by matching features between photographs. For this to occur accurately, those features must exist and must not be moving. Features in this case are defined by contrast between adjacent pixels, like the edge of a rock or building. If there is no contrast in the photos, there are no features to match, and therefore no point cloud can be resolved there. Thus freshly fallen snow in deep shadows have much fewer features to match than windblown snow in the sun. It is rare that no contrast can be found, but those features may be at a larger spatial scale than the mission intended, so that rather than producing a 10 cm DEM it may only be possible to create a 40 cm DEM there. In the absence of contrast at the intended spatial scale, camera sensor noise can be misinterpreted by the software as contrast defining real features and be used in reconstructing topography, which will lead to increased noise since they are not real features. This occurs rarely, but when it does it is typically on the order of random pits and spikes of 1-5 meter amplitude about the true elevation and is something that can be filtered out through post-processing. Fodar also does not work over liquid water bodies, as in calm conditions there is no contrast and under windy conditions the waves are moving. When the bed of the water body can be seen in the image, the contrast there will be used to reconstruct topography but the resulting elevations will not be accurate because the bending of light rays within the water has not been accounted for. Thus a shallow lake surface will appear to have an elevation, but it should be ignored or masked out in post-processing. If clouds and fog obscure the ground, their tops may be used to create elevation data, so the orthoimage must be examined to determined what is ground and what is cloud top. Because Fodar is a photographic process, part of the Fodar technique is to consider the optimal weather conditions for acquiring the raw data used in processing. There is no minimum or maximum size of a Fodar™ project. Typical sizes range from 20 to 200 square kilometers. The constraints are typically more about weather (bigger projects take longer), fuel (is enough available where you need it), and budget. Another important consideration regarding areal coverage is the file size that results -- a 10 km by 10 km area at 10 cm GSD will create 70 gigabytes worth of final DEM and orthoimage, not including the raw imagery. Most computers today have a difficult time handling such files. That's why we developed FodarEarth™, so these data can be shared online to almost any Windows computer. fodarearth image Compared to lidar, Fodar™ maps are just as accurate and precise, if not more so, plus Fodar™ produces a perfectly co-registered orthophoto whereas lidar only produces a DEM. The importance of an associated orthoimage should not be underestimated when trying to interpret changes to the earth's surface, as the images below demonstrate. Another issue with lidar is that there are many lidar manufacturers and many lidar operators, and thus there is a wide variety in lidar quality. All fodar operators use the same airborne hardware with centralized training, and all processing is done by the same central office, assuring that quality control standards are consistent and high between operators. Perhaps most importantly, Fodar™ is typically 10-100x less expensive than lidar, allowing end-users to not only make one good map of their site, but a time-series of them.
Fodar™ is a form of digital photogrammetry, where the photogrammetric software is based on the Structure from Motion algorithm. Digital photogrammetry is fun and exciting, and anyone interested in doing themselves should give it a try. With both camera hardware and photogrammetric software continually getting cheaper and easier to use, nearly anyone with an interest and basic aptitude can start making digital photogrammetric maps on their own. With just the basics of a camera and handheld GPS you may already have plus software ranging from free to several hundred dollars, you should expect to be able to make maps with an accuracy of about 30 meters and and a precision of about 10 meters. With enough perseverence, you can probably make photogrammetric maps on par with Fodar™. However, doing so will require a deep understanding of photogrammetry, photography, geophysics, GPS, and flight planning, as well as a substantial investment in software and technique development -- making the leap to Fodar™ accuracy is not trivial or cheap by comparison.. But not every project requires the accuracy and precision that Fodar™ can offer, so if you have the interest in doing it yourself, give it a try!
|
|---|
(c) 2014 Matt Nolan
These images may not be reproduced for commercial purposes.